
Beim Forschungsprojekt Piezo Peening konnten wir uns ausführlich mit dem Thema des maschinellen Oberflächenhämmerns beschäftigen.
Kooperationspartner des Projektes:
– WEGA-Konstruktion
– Siebenwurst Werkzeugbau GmbH
– Fraunhofer IWU, Chemnitz
Nachfolgend finden Sie eine Kurzbeschreibung der Arbeitspakete der robotized sowie eine Kurzfassung der Forschungsergebnisse. Diese dienen als schnelle Informationsquelle zu den wichtigsten Punkten.
Weiterführende Informationen finden Sie in Kürze in unserem Schlussbericht als PDF verlinkt.
Aufgaben der robotized
Arbeitspaket 4: Ansteuern der Piezoaktorik
AP 4.4: Übergabe positionsabhängiger Technologieparameter
Im Arbeitspaket 4 (Ansteuern der Piezoaktorik) ging es um die Erarbeitung eines Steuerungskonzeptes für das Piezo-Klopfwerkzeug.
Auf Basis der vom Fraunhofer IWU entwickelten Steuerungselektronik des piezoelektrisch angetriebnen Werkzeugsystems war unsere Aufgabe die CAD/CAM Anbindung, um positionsabhängig die entsprechenden Technologieparameter zu übergeben. Anhand verschiedener Bahnstrategien wurden Parameter wie Vorschubgeschwindigkeit, Vorschubrichtung, Aufprallwinkel, Zustellabstand, Glättungen, Punktabstand und Winkeländerungen berücksichtigt. Die Ausgabe wurde anhand eines Kuka 6-Achsen-Industrieroboters mit Kuka KRC Steuerung umgesetzt. Die Übertragung auf weitere Robotersteuerungen ist problemlos möglich.

Abbildung: CAD Modell für Technologieparameter
Arbeitspaket 6: CAM-Strategien Piezo Peening (Steuerung/Technologie)
Die Aufgabe des Arbeitspakets 6 bestand darin, für das Festklopfverfahren mittels Piezo-Aktor eine geeignete Werkzeugbahnplanung zu finden. Zu Beginn wurde ein erstes Konzept entwickelt, auf dessen Basis eine automatisierte Bahnplanung aufbaut. Ziel war es neben einfachen Versuchsbauteilen ebenso komplexe 3D Geometrien abbilden zu können. Anhand von Versuchsbauteilen sollte über mehrere Optimierungsschritte eine optimierte Bahnplanung erreicht werden. Letzendlich musste die Bahnplanung im Standard-Softwaremodul integriert sein und komplexe Werkstückgeometrien berechnen. Die Eignung wurde anhand von Versuchen geprüft.
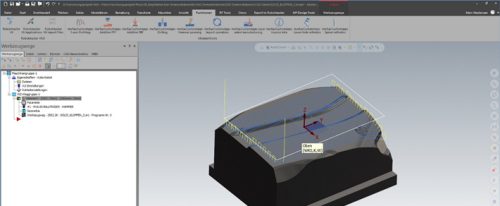
Abbildung: Beispielgeometrie zur Bahnberechnung
Arbeitspaket 7: Demonstratorsystem
In Arbeitspaket 7 beschäftigten wir uns mit Implementierung in ein Demontratorsystem.
Hier wurden zum einen das Softwarepaket in Betrieb genommen und auch die Simulation (Soll) und die Realität (Ist) abgestimmt. Ein wesentlicher Aspekt sind die Simulationselemente im Raum. Dazu wurd die Roboteranlage vermessen und die Geometrie des Endeffektors letztendlich definiert.Zum Abschluß des Demonstratorsystems wurde bereits ein ersten Bauteil geklopft.
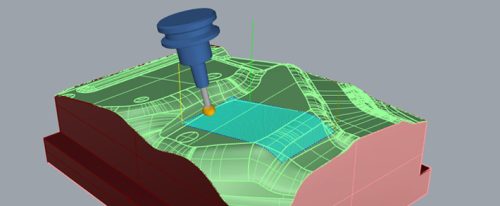
Abbildung: PiezoPeening CAM System, Bahnplanung
Arbeitspaket 8: Experimentelle Verifizierung
In Arbeitspaket 8 wurde in Zusammenarbeit mit den Projektpartnern Bauteile programmiert und mittels Postprozessor die entsprechenden Roboterprogramme generiert. Mit abgestimmten Prozessparametern wurde so mehrere Bauteile erfolgreich bearbeitet.

Abbildung: Geklopftes Logo Fraunhofer IWU

Abbildung: Versuchsanlage am IWU – Piezo Peening, Kuka Roboter

Abbildung: Prozess Piezo Peening, Festklopfen
Kurzfassung
In Kürze verfügbar.
Unternehmen Region – Die BMBF-Innovationsinitiative für die Neuen Länder Verbundvorhaben Wachstumskerne, WK Potential, ZIK, InnoProfile, zwanzig20: PiezoPeening
Dieses Forschungs- und Entwicklungsprojekt wurde mit Mitteln des Bundesministeriums für Bildung und Forschung (BMBF) im Rahmenkonzept „Unternehmen Region – Die BMBF-Innovationsinitiative für die Neuen Länder” gefördert und vom Projektträger Jülich (PTJ) betreut.
